obstacleAvoidanceVREP Component
25th August, 2019
This post will describe how to create obstacleAvoidanceVREP component and implementing various functionalities to it. This component will serve as client to laserVREP and differentialRobotVREP components and thus communicates with each of them to make the differential robot avoid obstacles.
obstacleAvoidanceVREP controller
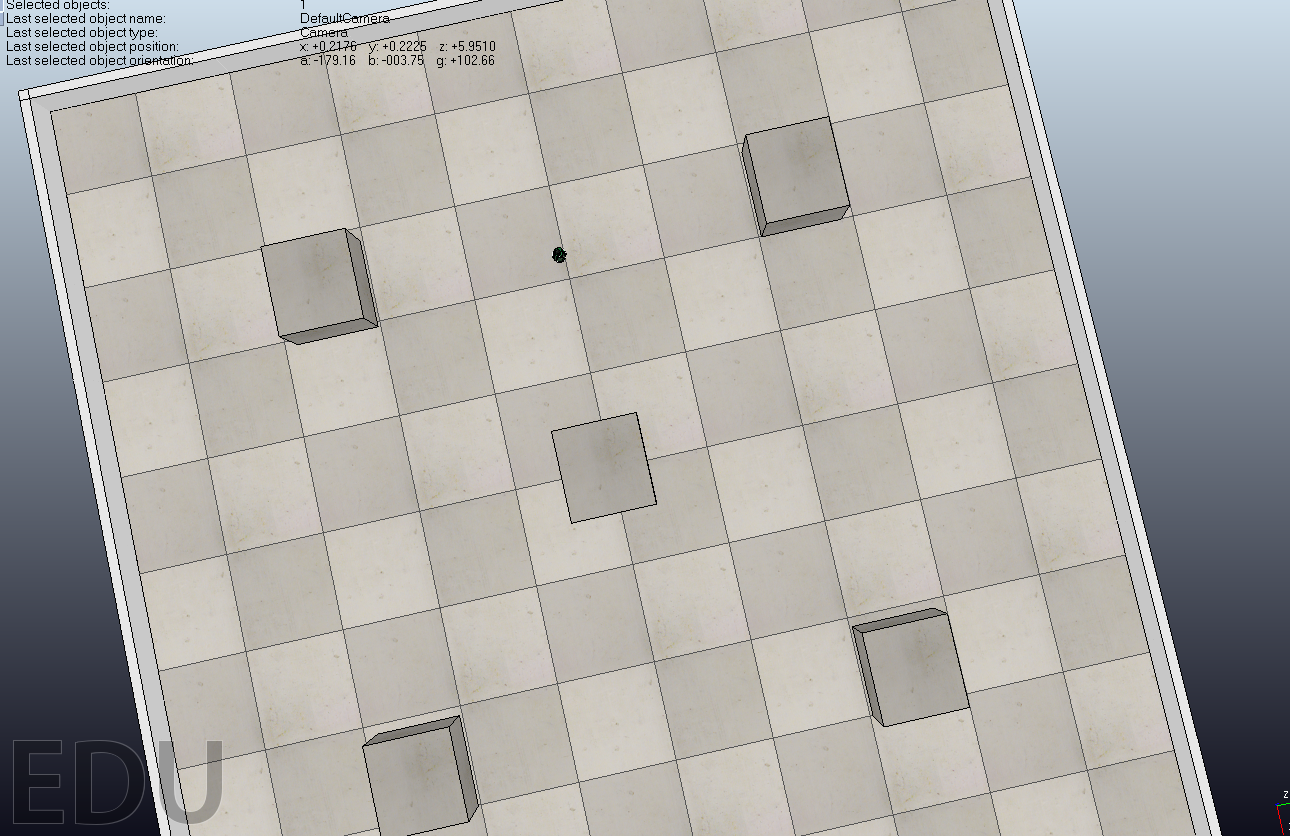
This component communicates with laserVREP component to get data(distance, angle) of the obstacles within the scanning area (simulated on V-REP). And, using that data it determines the directions to move so as to avoid obstacles. The below image shows the V-REP scene used for testing the obstacleAvoidanceVREP Component:
The compute method in specificworker.py file of obstacleAvoidanceVREP component calls the getLaserData() method of laserVREP component to get the data about the obstacles(simulated on V-REP).
Using the data (which is list of tuples (distance, angle) ), obstacleAvoidanceVREP component determines which direction to move, for example:
- if the closest obstacle is less than 50cm and its in -30 to 30 degree angle it rotates and change the direction.
to turn to the determined direction, obstacleAvoidanceVREP component calls the setSpeedBase(self, adv, rot) method of differentialrobotVREP component.
The code for the above logic looks like this:
NOTE: This is a very naive algorithm for avoiding obstacles, a more refined and proper algorithms could be used for better results. As, this components is just for testing the compatibility of laserVREP component with RoboComp, I didn’t implemented such algorithms.
laserData = self.laser_proxy.getLaserData();
obstacleData = [(laserData[i].dist, laserData[i].angle) for i in range(len(laserData))]
# rotational velocity
rot = 0.7
# distance and angle corresponding to closest obstacle
distance, angle = min(obstacleData)
if distance < 50 and -30 <= angle <= 30:
self.differentialrobot_proxy.setSpeedBase(0, rot)
And, here is the gif to show the robot avoiding obstacles:
Creating the components
Now I will discuss the dependencies of each of these components and the interfaces which can be used by other components to interact with it.
First, lets discuss the server components for our obstacleAvoidanceVREP component:
-
differentialrobotVREP component:
differentialrobotVREP.cdsl
import "DifferentialRobot.idsl"; Component differentialrobotVREP { Communications { implements DifferentialRobot; }; language python; };So as we can see the differentialrobotVREP component is not dependent on any other component and it will be used as a server. However it has 8 different methods which can be used by other components for communication. These are described in the following IDSL file.
DifferentialRobot.idsl
import "GenericBase.idsl"; module RoboCompDifferentialRobot { struct TMechParams { int wheelRadius; int axisLength; int encoderSteps; int gearRatio; float temp; string device; string handler; float maxVelAdv; float maxVelRot; }; interface DifferentialRobot { void getBaseState(out RoboCompGenericBase::TBaseState state) throws RoboCompGenericBase::HardwareFailedException; void getBasePose(out int x, out int z, out float alpha) throws RoboCompGenericBase::HardwareFailedException; void setSpeedBase(float adv, float rot) throws RoboCompGenericBase::HardwareFailedException; void stopBase() throws RoboCompGenericBase::HardwareFailedException; void resetOdometer() throws RoboCompGenericBase::HardwareFailedException; void setOdometer(RoboCompGenericBase::TBaseState state) throws RoboCompGenericBase::HardwareFailedException; void setOdometerPose(int x, int z, float alpha) throws RoboCompGenericBase::HardwareFailedException; void correctOdometer(int x, int z, float alpha) throws RoboCompGenericBase::HardwareFailedException; }; };As you can see in the above idsl file, the differentialrobot offers an interface setSpeedBase . We will use this interface to change the direction of robot and to move the robot using our obstacleAvoidanceVREP component.
-
laserVREP component
laserVREP.cdsl
import "Laser.idsl";
Component laserVREP
{
Communications
{
implements Laser;
};
language python;
};
So as we can see the laserVREP component is not dependent on any other component and it will be used as a server. However it has 3 method which can be used by other components for communication. These are described in the following IDSL file.
Laser.idsl
import "GenericBase.idsl";
module RoboCompLaser
{
sequence<int> shortVector;
/** \struct TCamParams
*@brief struct camera params
*/
struct LaserConfData
{
string driver; // Underlying hardware: HokuyoURG/Gazebo
string device; // Laser device: hardware dependent
int staticConf; // 0 means it has a dynamic laser configuration
int maxMeasures; // Total number of possible measures (Laser specific)
int maxDegrees; // Angular measurement range degrees (Laser specific)
int maxRange; // Maximun distance measurable mm (Laser specific)
int minRange; // Minimun distance measurable mm (Laser specific)
int iniRange; // (0-totalRange) Initial measuring position
int endRange; // (0-totalRange) End measuring position
int cluster; // (0-99) Number of neighboor positions grouped
int sampleRate; // Adquisition period in msecs
float angleRes; // Angle resolution
float angleIni; // Initial angle
};
/** \struct TData
*@brief Data laser
*/
struct TData
{
float angle;
float dist;
};
sequence<TData> TLaserData;
/** \interface Laser
*@brief interface Laser functions
*/
interface Laser
{
/** @brief Get laser data */
TLaserData getLaserData();
/**@brief Get laser data and base local state */
TLaserData getLaserAndBStateData(out RoboCompGenericBase::TBaseState bState);
/**@brief Return relevan comp params
* @return struct LaserConfData
*/
LaserConfData getLaserConfData();
};
};
As you can see in the above idsl file, that the Laser offers an interface getLaserData() . We will use this interface to get the data about the obstacles and then using that data determine the direction in which to move the robot in our obstacleAvoidanceVREP component.
Now moving forward to the client component. It is the main component which will implement the logic for the robot to avoid obstacles. Here is the cdsl file for the same.
obstacleAvoidance.cdsl
import "DifferentialRobot.idsl";
import "Laser.idsl";
Component obstacleAvoidance
{
Communications
{
requires DifferentialRobot;
requires Laser;
};
language python;
};
As explained earlier, this component communicates with laserVREP component to get data on obstacles. And, using that data it determines the directions to move so as to avoid obstacles.
Testing the Component
My current repository can be found here. For testing copy the folders laserVREP, differentialrobotVREP, obstacleAvoidanceVREP inside robocomp/components/. And the scene file can be found here.
NOTE: I have used the same differentialrobotVREP component as the one I used with keyboardcontroller component with no change. I only changed the port in etc/config.
cd robocomp/components/
Open 4 new terminals.
Terminal 1:
1. Open the scene obstacleAvoidanceDemo.ttt in V-REP.
2. Now, start the scene. That will start the server with two socket at 19999, 19998.
Terminal 2:
cd differentialrobotVREP
python src/differentialrobotVREP.py --Ice.Config=etc/config
Terminal 3:
cd laserVREP
python src/laserVREP.py --Ice.Config=etc/config
Terminal 4:
cd obstacleAvoidanceVREP
python src/obstacleAvoidanceVREP.py --Ice.Config=etc/config
Now, switch to the V-REP simulator and see the robot avoiding obstacles.
PS: I would like to express my sincere gratitude to my project mentors Pablo Bustos, Nicolás González Flores, and José Manuel Agúndez for being very supportive and helping me whenever I faced any problem.
Nikhil Bansal