First coding period
This period has been up for almost a full month. During these weeks, I’ve got the chance to discover the inner workings of LearnBlock, adapt myself to working in a public project, communicate with my mentors and (finally!) write code and implement features.
Communication and collaboration
During the first days, I didn’t have much idea about where should I look. Yes, I’ve had previously submitted a PR making simple changes to the parser, but it was not enough. Fortunately, my mentors were very helpful: they provided constant guidance through my first big changes, and gave me useful hints to speed up debugging and prototyping.
I think this goes in line with what makes the Open Source community great: you don’t have to work alone, because you get to know people which makes your journey a bit easier.
Little improvements
I began making little incremental changes, just to make further modifications easier:
-
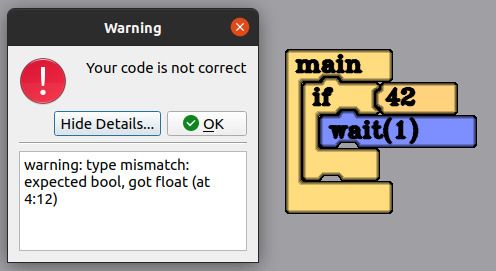
An status interface was defined to standarize communication between the parser producing the diagnostics and the frontend consuming them. Right now it handles severity (like warning, info, or error), location and a hardcoded message. It can change in the future, but right now it is descriptive enough to allow for simple error reporting.
-
The parser was cleaned, removing redundant grouping and making the operator subexpressions explicit. Previously, they were just a string of tokens (so precedence was tied to Python’s rules). After these changes, grouping was made explicit and the grammar was made more flexible by allowing for different precedence rules and operators than the ones you can find in Python.
Parser overhaul
At some point during these changes, right before trying to implement a type checker, I’ve noticed that it was going to take quite a bit of effort to handle all the different nuances in the behavior of each node. The entire code generation was procedural, with some global variables which made difficult to follow the flow of the program state.
I decided to turn it into a little class hierarchy, where each node was an
instance of a class, in turn descendant from a generic Node class. There were
lots of advantages supporting this transition:
-
Behavior could be close to the data being handled, as each class had its own methods which could override defaults. This makes understanding the program logic easier, as you knew easily which method was tied to which kind of node, and which properties did it have available to use.
-
For lots of node types, code could be reused, as sane defaults were provided in the parent class and children could choose not to override them.
-
It got rid of the “global state” problem by encapsulating it inside a context. The context is an object which has to be passed explicitly, so it is easy to keep track of what was being changed at any point.
After doing these changes, I’ve asked my mentors for feedback. They liked the changes, so I could now focus on new features…
The type checker
This was one of the deliverables proposed. The type checker takes a parsed syntax tree and checks for every subexpression if the inferred type matches the expected one (both parameters and the return type). The types added are simple, number (both integer and floating point), string and bool.
Testing and final touches
Even if testing and implementation were done at the same time, I wanted to check it thoroughly. I ran both the upstream parser and my version, trying to generate Python code and look for differences. The generated code was always equivalent, but now errors could be detected and located!
I showed these results to my mentors, and made a PR which got finally merged.