Final Pose Estimation Settings
DATE : July 15, 2020
In this post, I share the final settings of pose estimation DNN and component. Also, I discuss recent updates and final training results.
Pose Estimation Progress
-
After training
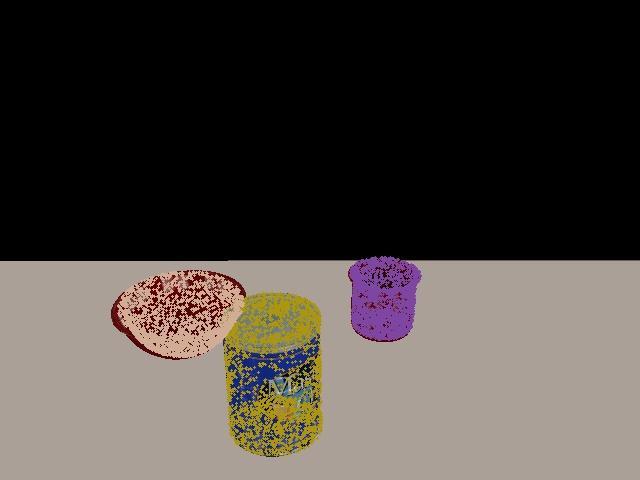
Segmentation-driven 6D Object Pose Estimationnetwork on the final setting (focal loss + textured objects), I tested the network performance on both RGB data from YCB-Videos dataset and CoppeliaSim simulator. The trained network performs well in both cases, however the poses can be inaccurate in specific cases with high occlusion. This is, mainly, due to the fact that small errors in the extraction of 2D keypoints can greatly affect the 3D poses. - Consequently, I had to search for a way to refine the bad poses. The search process was very long, as I explored both classical and DNN-based methods. However, here is a brief overview of my search directions and their results :
- First, I searched for classical methods for pose estimation and refinement. The majority of these methods uses visual features, extracted using classical methods like SIFT and ORB, in order to solve 2D-3D correspondace problem, which is exactly the methodology of
Segmentation-driven 6D Object Pose Estimationnetwork. However, these methods don’t work well with complex objects, so I didn’t go for them. - Second, I continued searching for DNN-based methods. I focused my search on RGBD-based methods, as depth information can greatly improve the DNN performance. I tried
DenseFusionpretrained network and the results were very good. Consequently, I tried to search for improvements overDenseFusion, which led me toPVN3D, which was published in CVPR 2020.
- First, I searched for classical methods for pose estimation and refinement. The majority of these methods uses visual features, extracted using classical methods like SIFT and ORB, in order to solve 2D-3D correspondace problem, which is exactly the methodology of
-
I studied
PVN3Dnetwork, understood the open-source code and wrote an inference script myself. After trying the pretrained network on YCB-Videos and simulator data, I found out that the results are actually very good and stable. However, this came with one issue, which is inference time.Segmentation-driven 6D Object Pose Estimationcan run at 20 FPS, meanwhilePVN3Druns at 3~4 FPS. - Finally, my decision was to use
Segmentation-driven 6D Object Pose Estimationnetwork to get poses from RGB images (for fast inference) and usePVN3Dto correct bad poses from RGBD images (in the approach stage). Also, I decided to create a seperate component for each of them. This way, they can be used independently and adapt to any new situation.
Final Pose Estimation Structure
There are two separate pose estimation components, each uses the same component to publish the poses into the shared graph, which is objectPoseEstimationPub component. Also, each of them has a separate interface method to get poses, directly, by calling it. The two components are :
-
objectPoseEstimationRGBcomponent : responsible for object pose estimation using RGB image only and usesSegmentation-driven 6D Object Pose Estimationnetwork. -
objectPoseEstimationRGBDcomponent : responsible for object pose estimation using RGBD image and usesPVN3Dnetwork.
Pose Estimation Results

Other Updates
Apart from my work on pose estimation, I was working on grasping using Gen3 arm, as well. I defined the new arm in PyRep API and passed the unit tests. Then, I tried to work on grasping using PyRep IK (Inverse Kinematics) solver, but it didn’t work. This is, mainly, because PyRep IK solver is very sensitive to physical noise and requires excessive tuning of the target pose. Thus, we decided to utilize the work done with the original remote Python API and integrate it to PyRep.
Important Dates
- July 13, 2020 :
Finish Segmentation-driven 6D Object Pose Estimation network training and finalize objectPoseEstimationRGB component.
Commit : https://github.com/robocomp/grasping/commit/322ea4304bf07bd4efe378b89805ddc454a25d40
- July 15, 2020 :
Complete PVN3D network testing and inference scripts.
Commit : https://github.com/robocomp/grasping/commit/fd49394bc41abaeb5970b67e593170a53557204e
Upcoming Work
-
Complete
objectPoseEstimationRGBDcomponent usingPVN3Dnetwork. -
Adapt the original work with Gen3 arm to PyRep API.
-
Complete
viriatoGraspingPyrepcomponent for grasping test. -
Integrate pose estimation components into the new software architecture using
objectPoseEstimationPubcomponent.
Mohamed Shawky