HIGH QUALITY MONOCULAR DEPTH ESTIMATION FOR REAL-TIME
WORKFLOW
- Challenges:
- Trade off between Accuracy and Speed of the model - If model accuracy is high,Speed decreases for the prediction and vice-versa.
- Training on NYU dataset which involves complex indoor scenes. So, Model should be Generalizable and robust.
- Trade off between Accuracy and Speed of the model - If model accuracy is high,Speed decreases for the prediction and vice-versa.
- Evaluating on Available Pretrained Models on the basis of Depth Map Quality and Inference Time for 1 frame(on CPU)
- If Results are not good, Creating my own light-weight architecture/model for predicting High Quality Depth Map in Real-Time.
- Preparing the NYU Dataset
- Training the Model
- Evaluating the Results on the basis of quality Depth Map and Inference Time.
RESULTS OF AVAILABLE MODELS
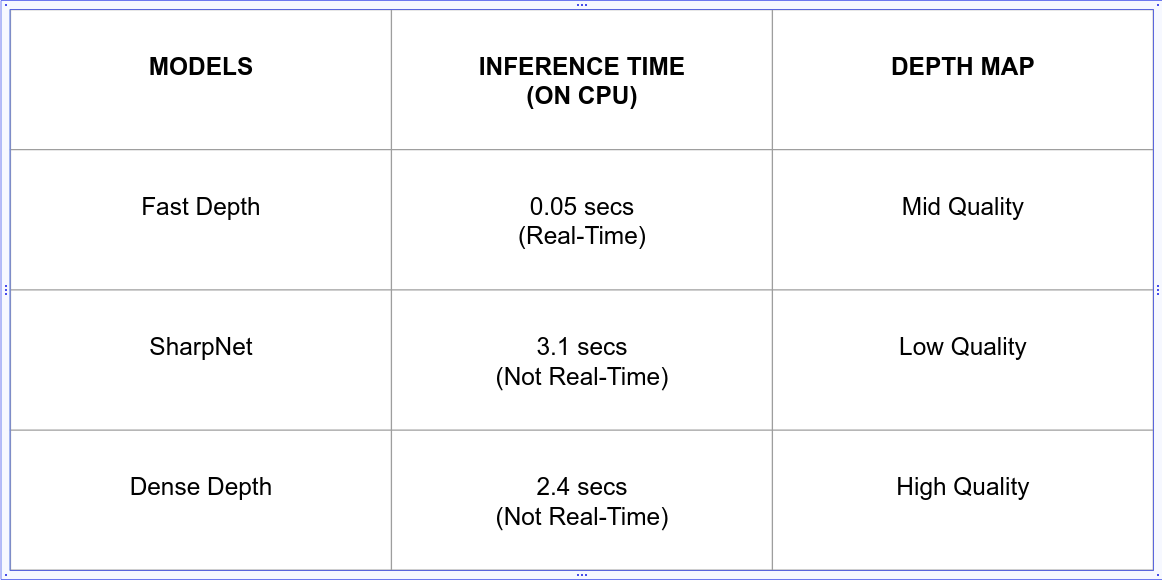
A) Fast Depth (REAL TIME, MID QUALITY DEPTH)

B) SharpNet (NOT REAL TIME, LOW QUALITY DEPTH)

C) Dense Depth (NOT REAL TIME, HIGH QUALITY DEPTH)

Most of the available models are trained on KITTI dataset which gave bad results on indoor scenes due to its complexity in scenes.
And Models trained on NYU dataset either give High Quality Depth Map or Real-Time prediction.
Thus, A new model is created which will give both High Quality Depth Map and Real-Time prediction named as MobDepth
RESULTS OF MY MODELS (named as MobDepth)
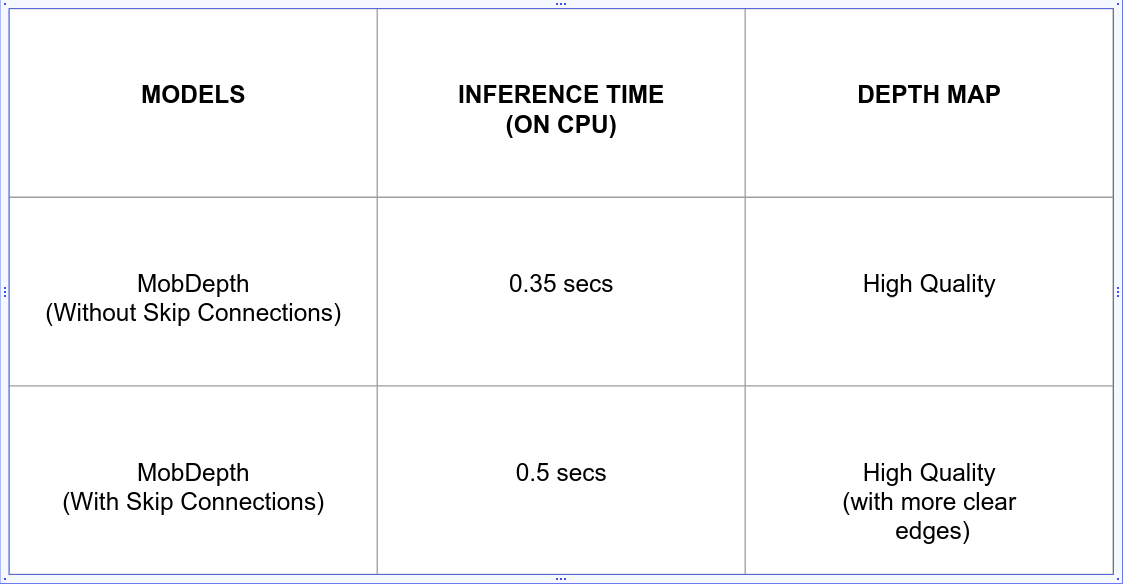
A) MobDepth(Without Skip Connections) (REAL TIME, HIGH QUALITY DEPTH)

B) MobDepth(With Skip Connections) (REAL TIME, HIGH QUALITY DEPTH)

FURTHER POSTS:
- Architecture of MobDepth
- Evaluating and Fine-Tuning the model on CoppeliaSim (Simulator) data.
- Final Results on Simulator Data.