ARCHITECTURE OF MobDepth:

- Input - Camera Frame (480,640,3) , Output - Depth Map (240,320,1)
- Design Choices:
-
Real-Time Estimation - As the model needs to predict in real time, thus a light-weight architecture is required.
As MobileNet uses least Number of Parameters without compromising on the Generalization, Thus it is used as Encoder.
-
Generalization and High-Quality Depth Map - MobileNet is Pre-trained on ImageNet Dataset and including Skip-Connections make it more generalizable, removing the problem of Vanashing Gradient.
SOME MORE RESULTS (on MobDepth(with Skip-Connections)):
a) Fig-1
 b) Fig-2
b) Fig-2

-
AUGMENTATION OF SIMULATOR DATA (coppeliaSim):
-
To integrate the component with robocomp, model should give high quality depth map on Simulator data as well, obained using coppeliaSim. Thus, NYU dataset is Augmented with Simulator Data.
-
Process of Data Collection of Simulator Data can be found in Data-Collector
FINE-TUNING USING COLLECTED SIMULATOR DATA:
- The Pre-Trained Model (“MobDepth (with Skip-Connections)”) is trained further on collected simulator data to give high quality depth map in simulated world.
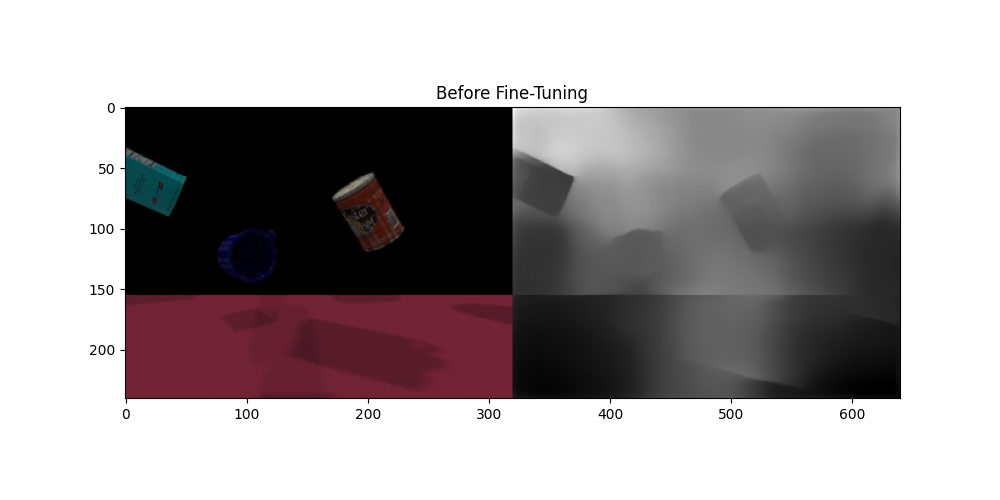
RESULTS BEFORE AND AFTER FINE-TUNING:
a) Fig-1

b) Fig-2

